Summary: Hello World
It’s often the first, but it also works as the last.
Let’s summarize from the very beginning, how to build and execute a minimal dummy BPMN process where Zeebe is used to orchestrate Robot Framework.

It’s the time for Hello World!
Process: hello-world.bpmn
Robot: hello-world.zip
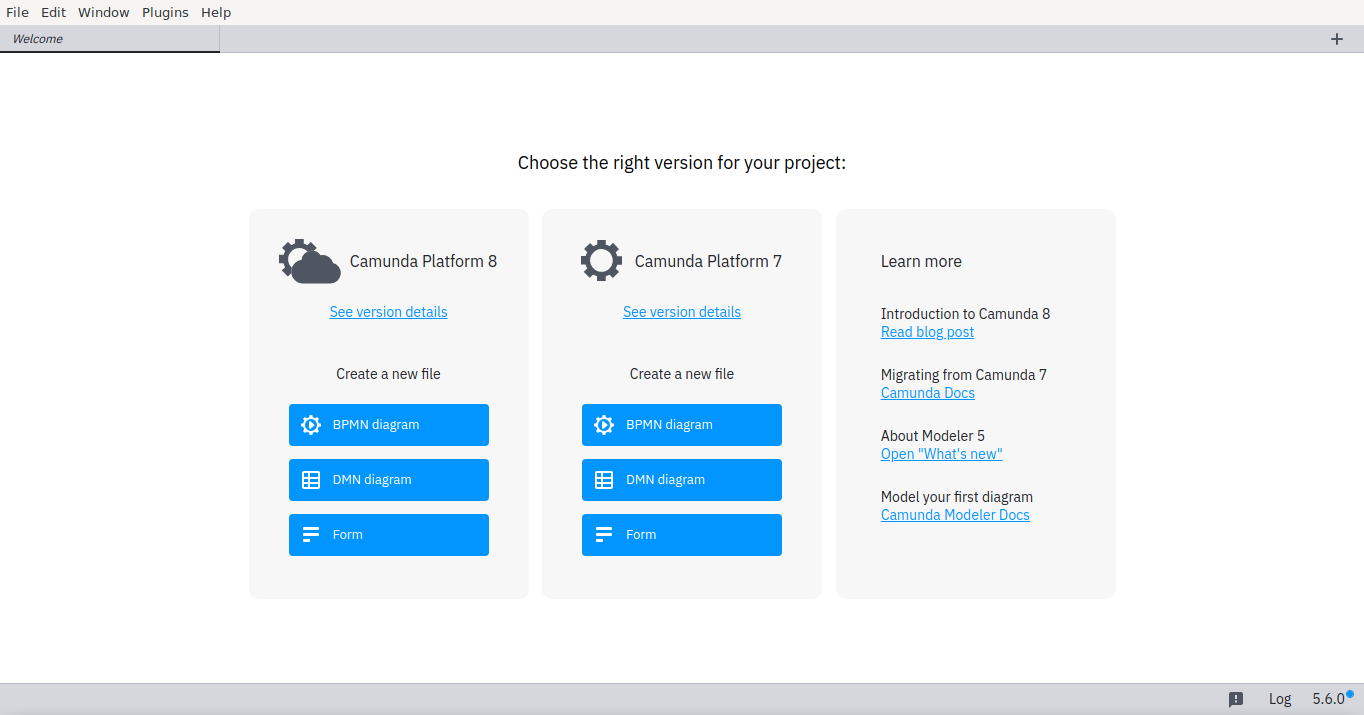
Start Camunda Modeler

Choose Camunda 8 BPMN
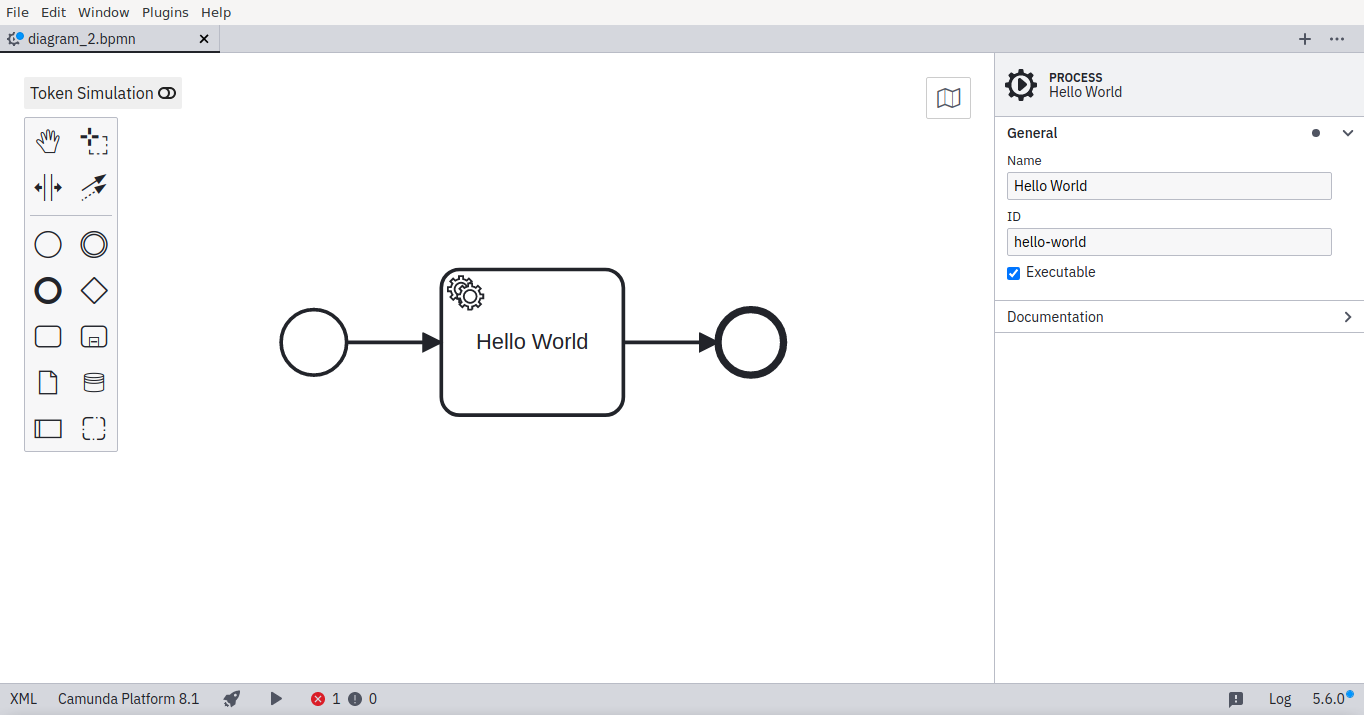
Draw minimal process flow
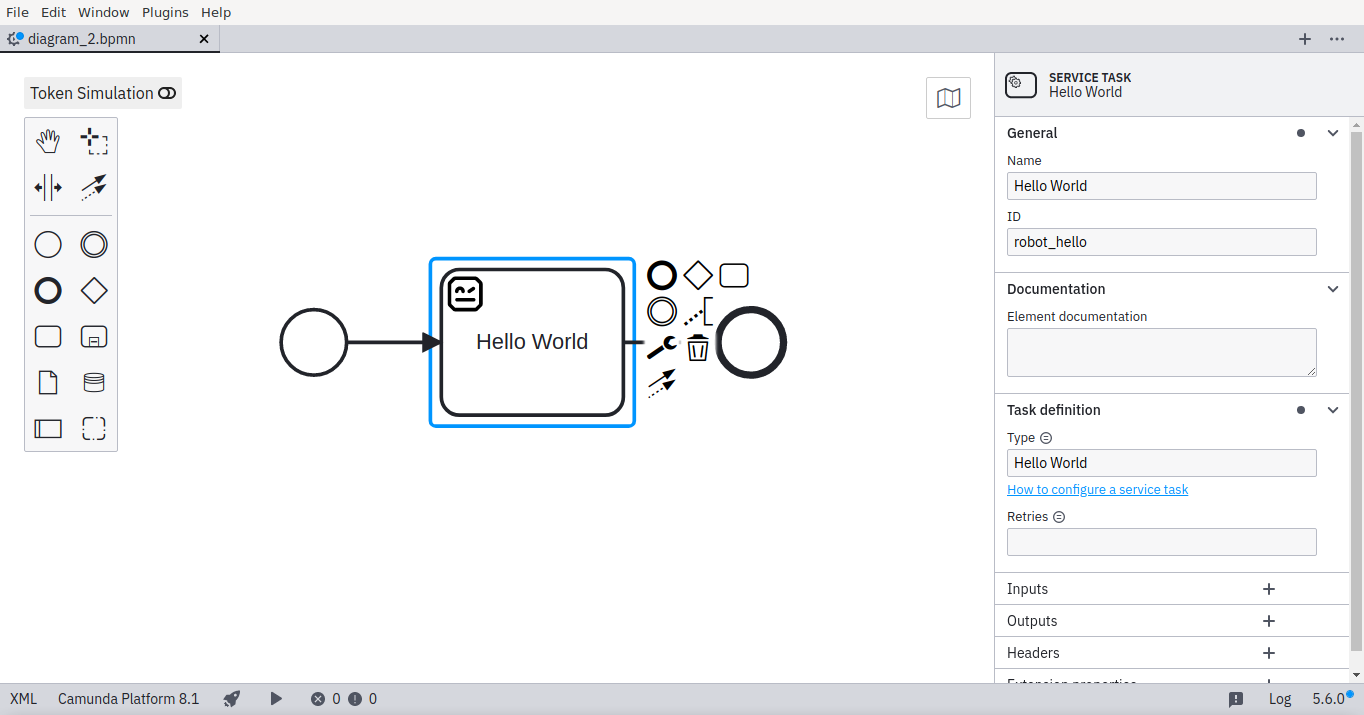
Configure the service task
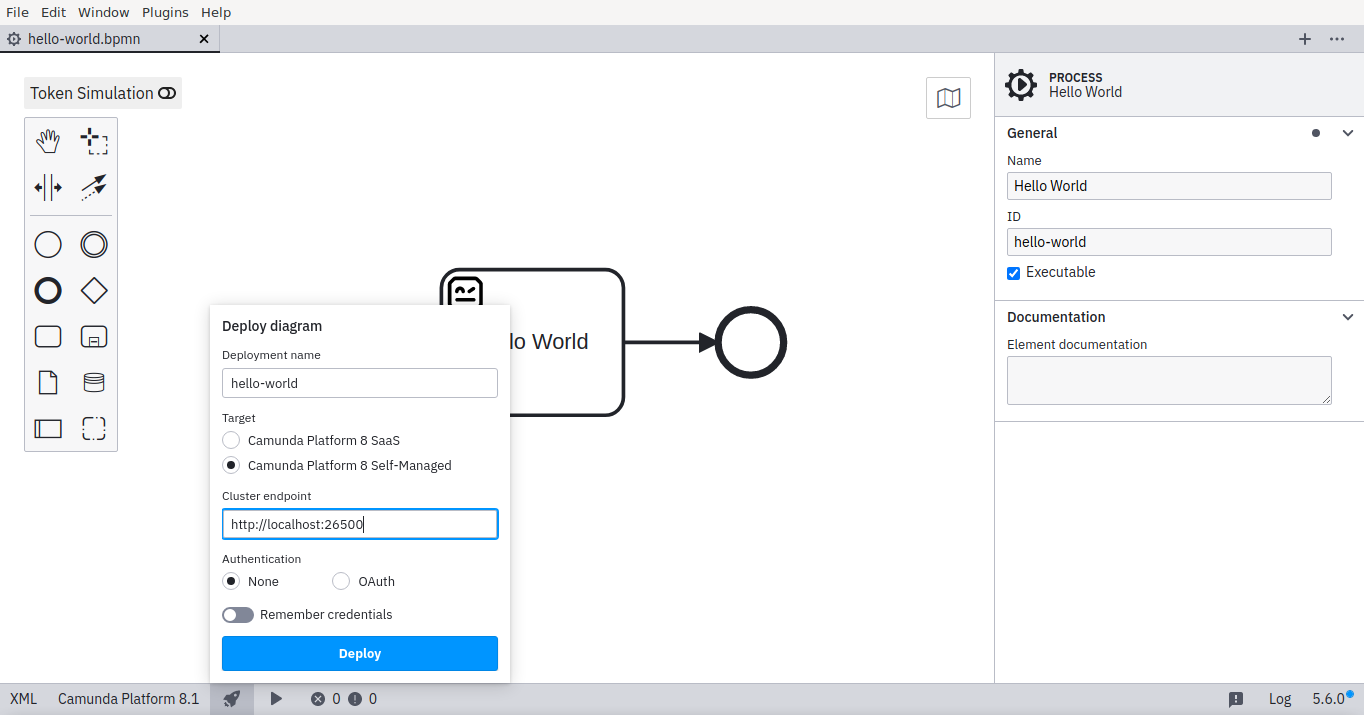
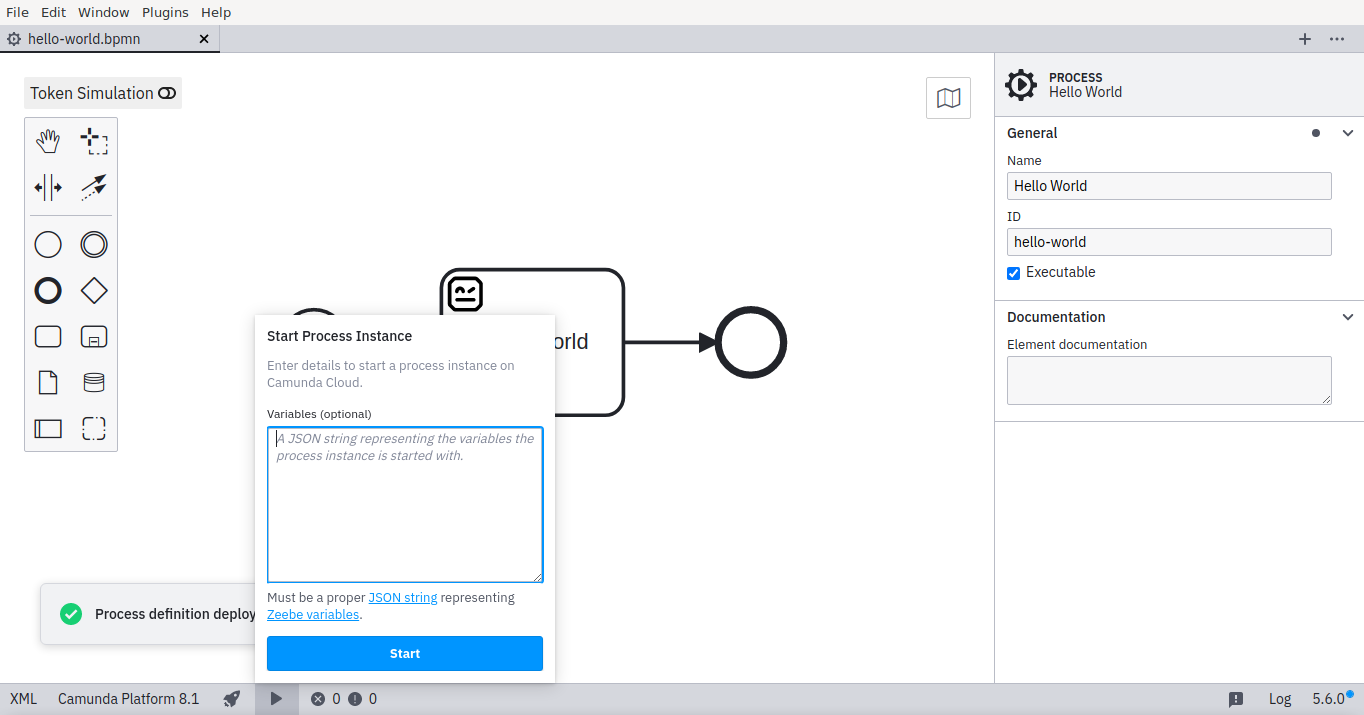
Deploy model definition
The playground Zeebe matches Camunda Platform 8 Self-Managed with Cluster endpoint http://localhost:26500 and Authentication: None.
Start new process instance
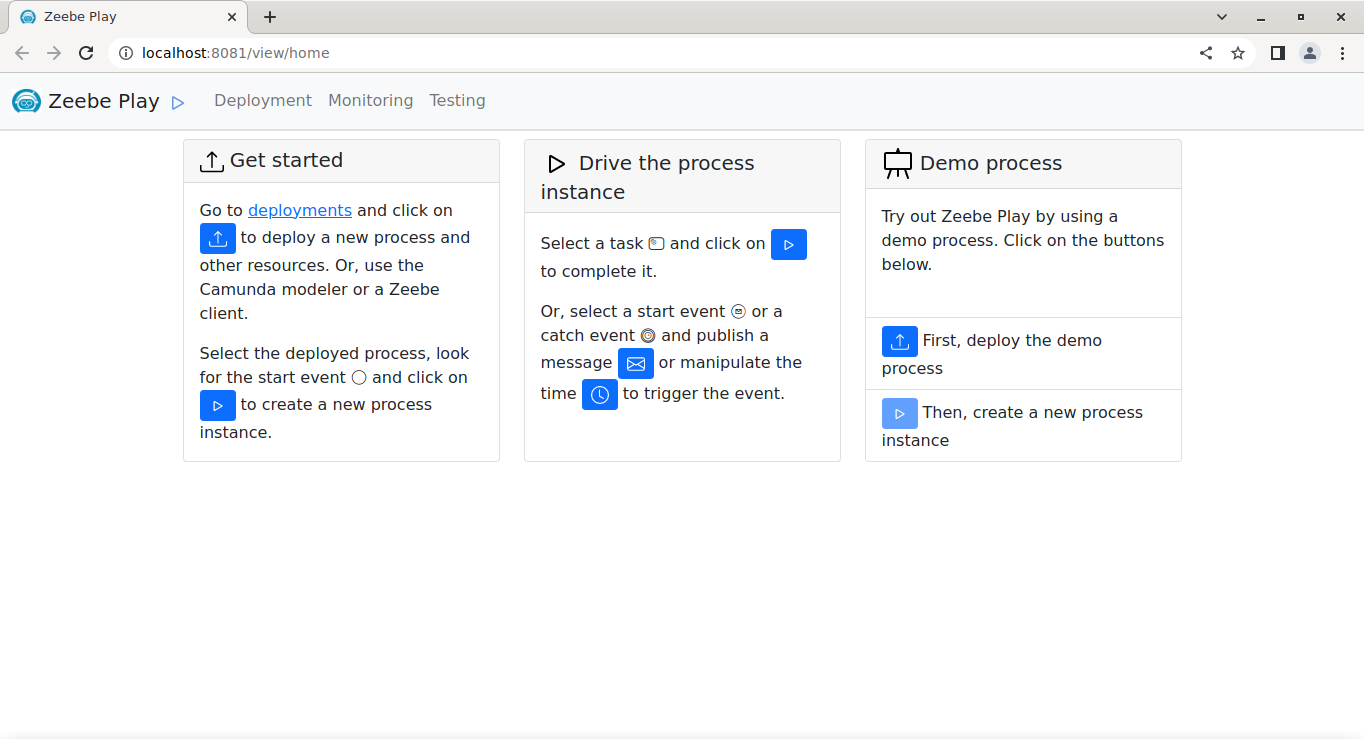
Open Zeebe Play
l
Choose deployments
Choose your deployment

Choose the started instance
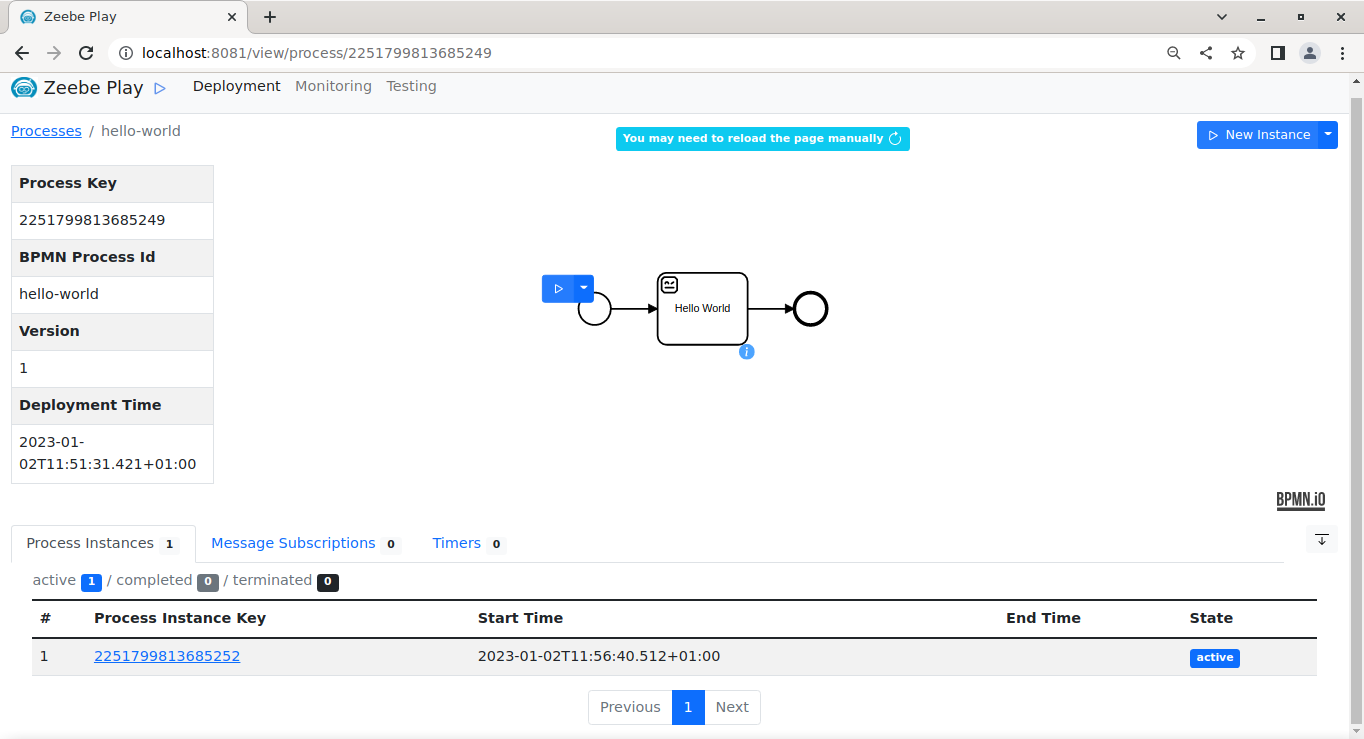
See how task is waiting

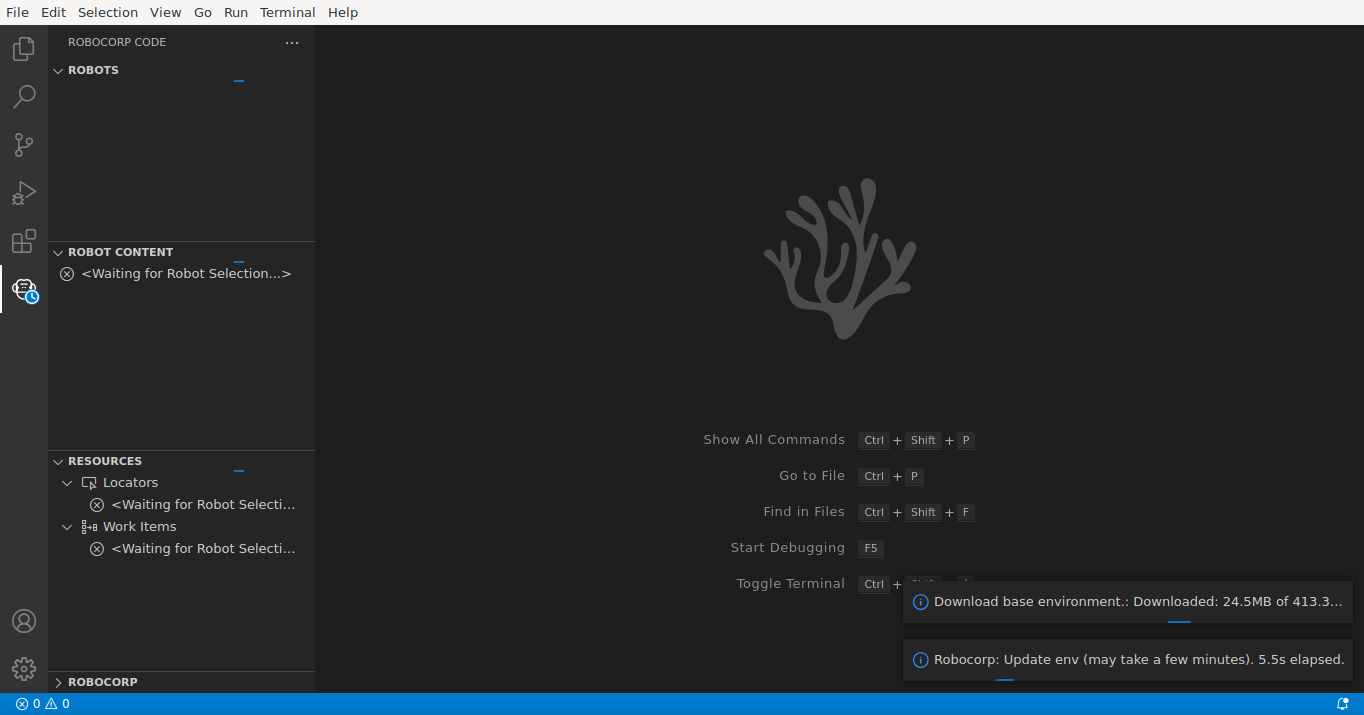
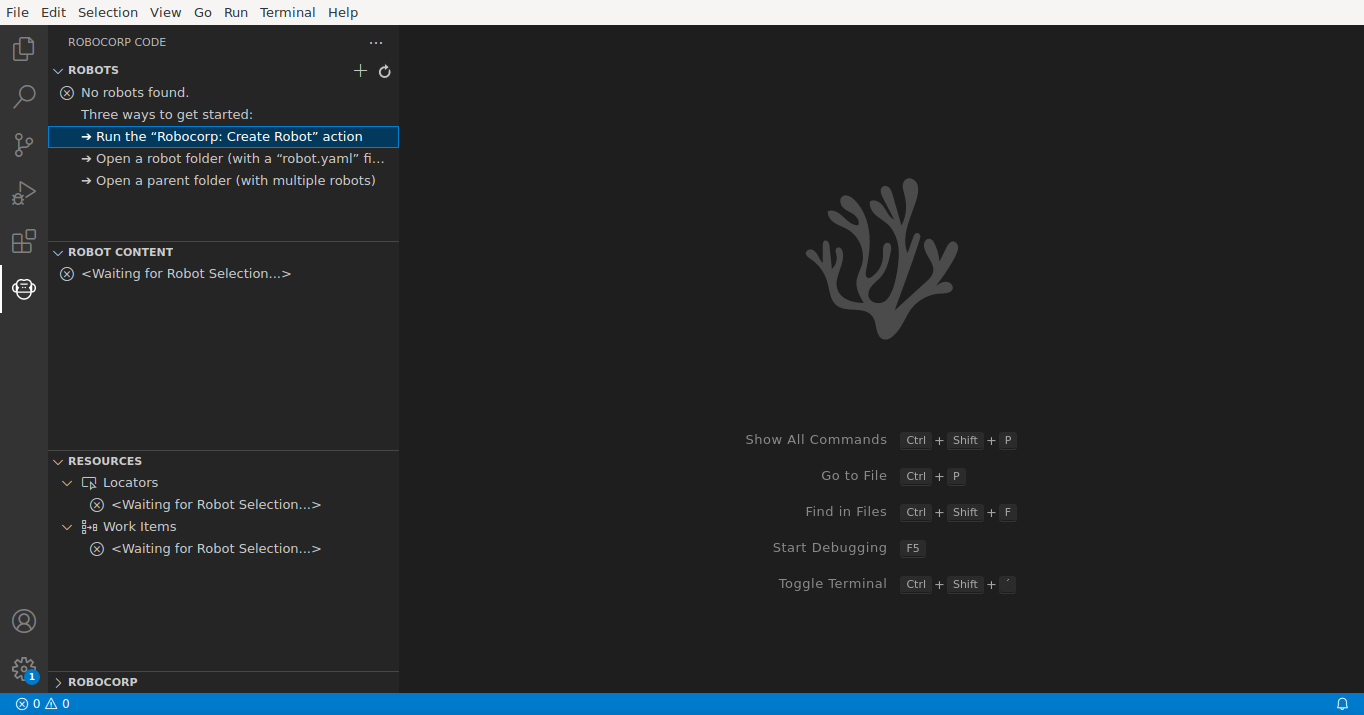
Open Robocorp Code

On the first run, wait…
Create new robot
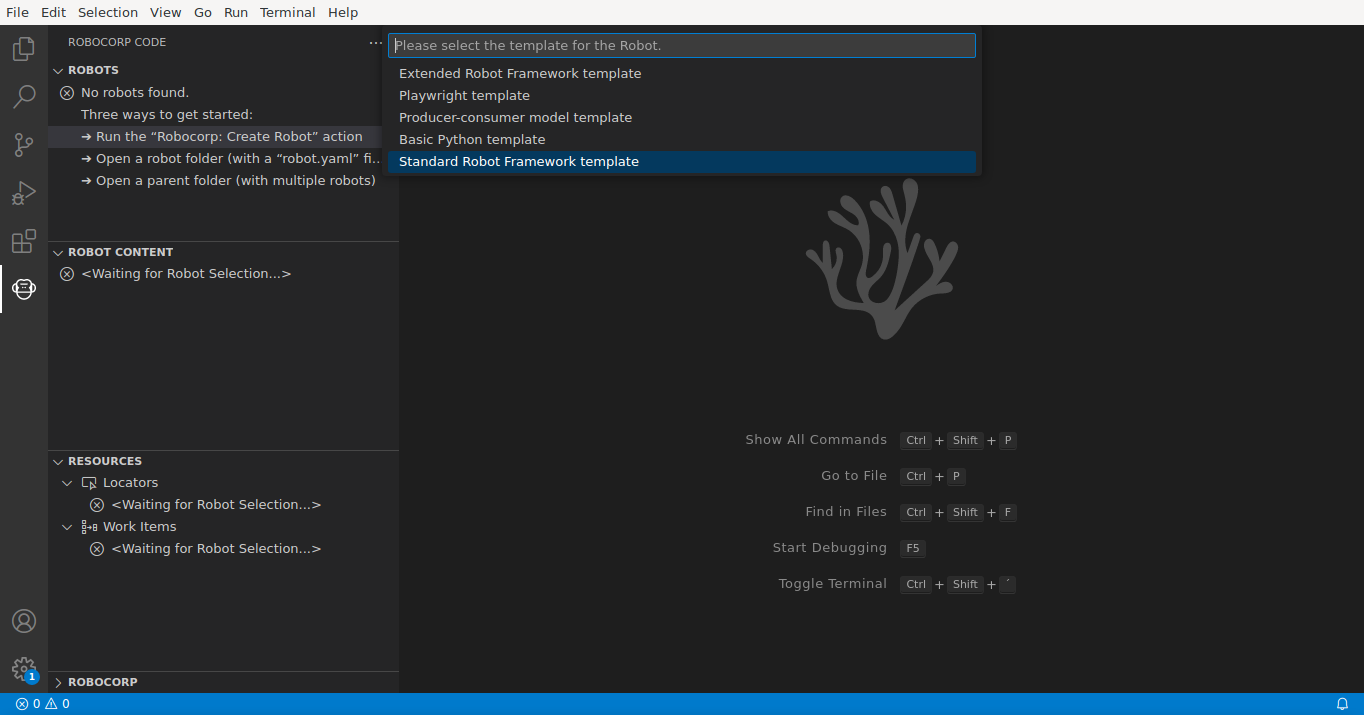
Choose standard template
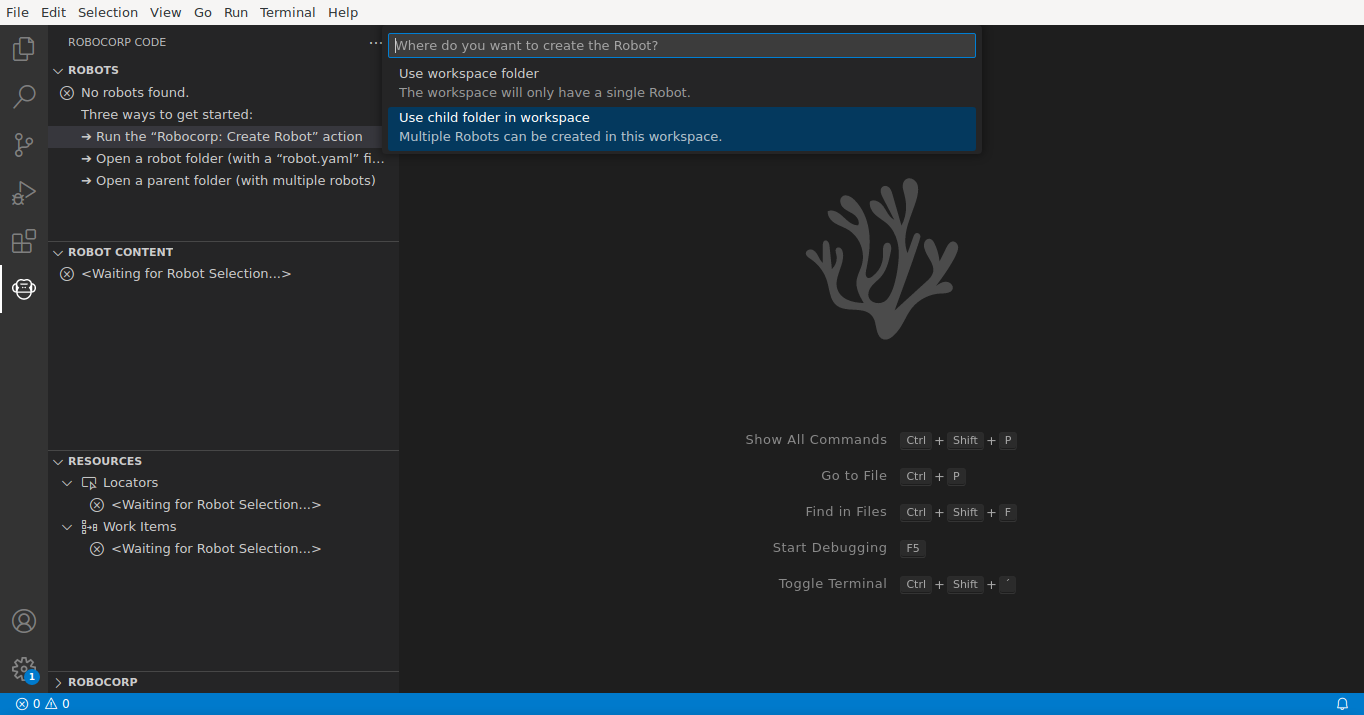
Confirm children in workspace
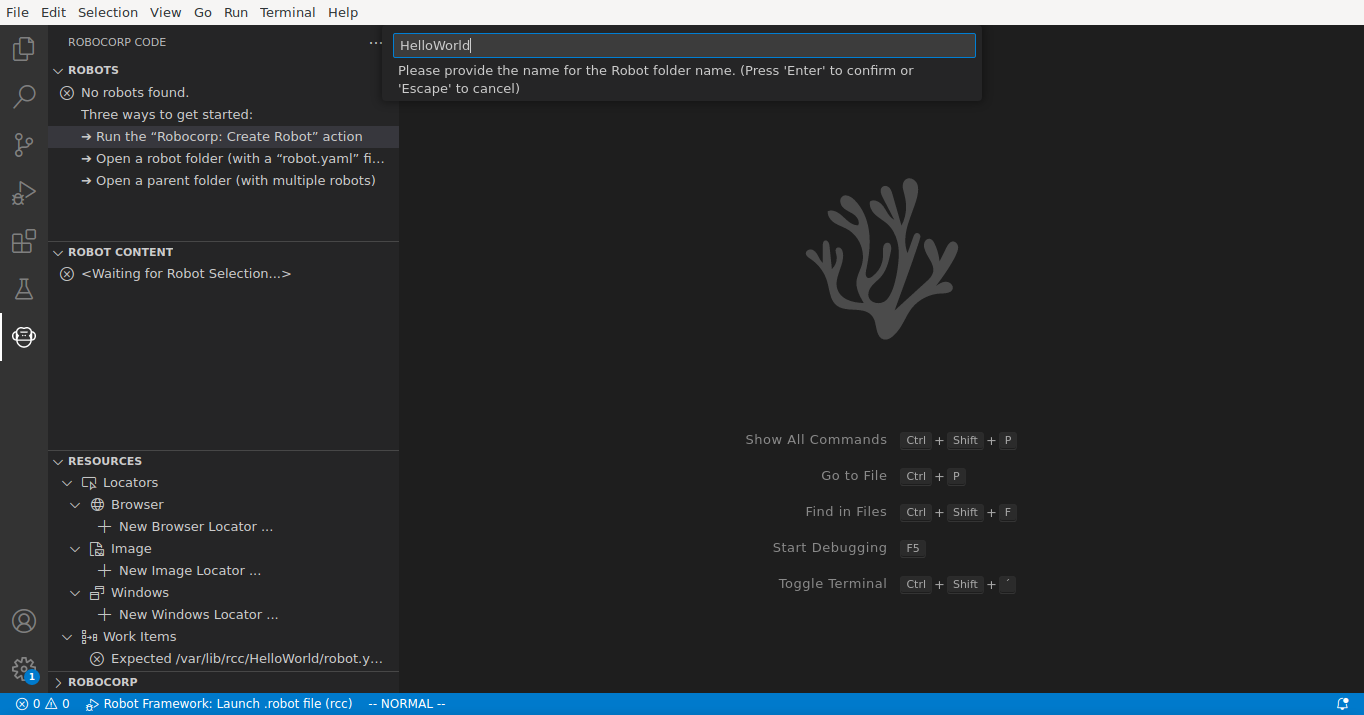
Give robot a name
Align robot.yml with BPMN
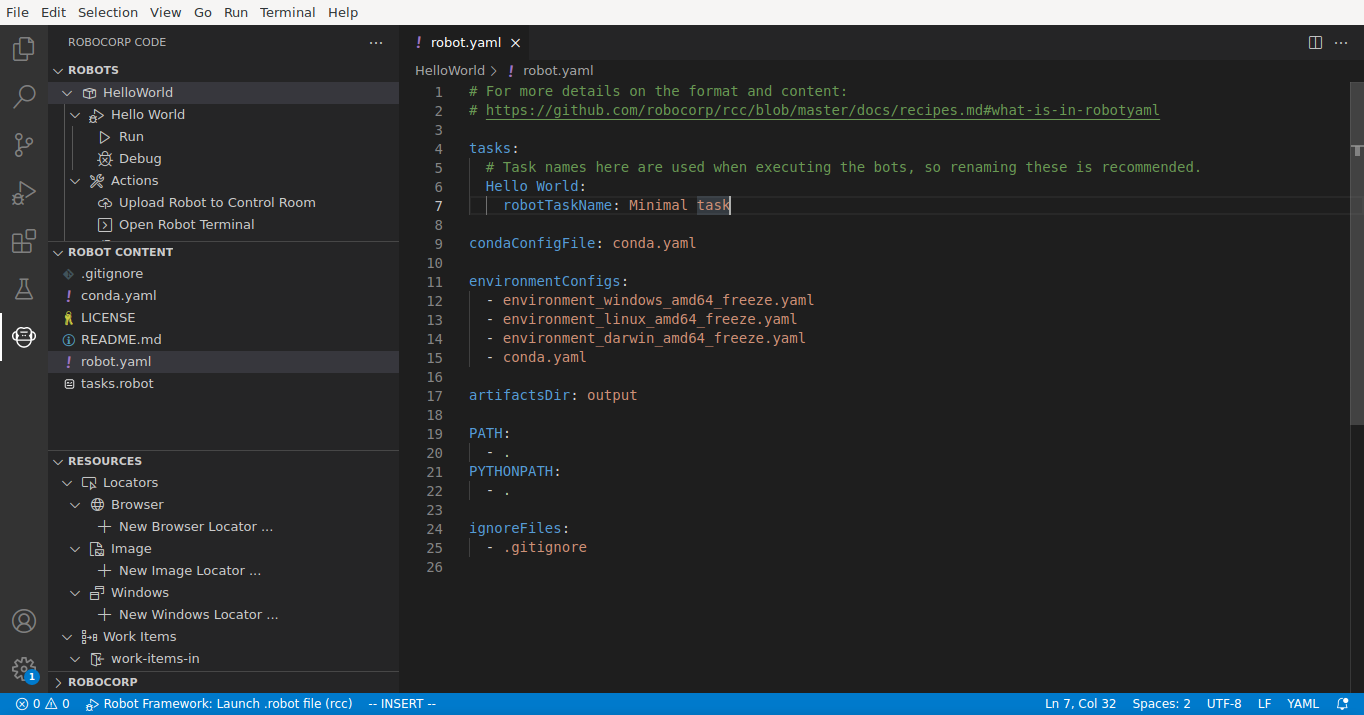
Update tasks: to have a task with your service task definition type Hello World and map it to the default task in the standard template in its tasks.robot with robotTaskName: Minimal task.
tasks:
# Task names here are used when executing the bots, so renaming these is recommended.
Hello World:
robotTaskName: Minimal task
condaConfigFile: conda.yaml
environmentConfigs:
- environment_windows_amd64_freeze.yaml
- environment_linux_amd64_freeze.yaml
- environment_darwin_amd64_freeze.yaml
- conda.yaml
artifactsDir: output
PATH:
- .
PYTHONPATH:
- .
ignoreFiles:
- .gitignore
# For more details on the format and content:
# https://github.com/robocorp/rcc/blob/master/docs/recipes.md#what-is-in-robotyaml
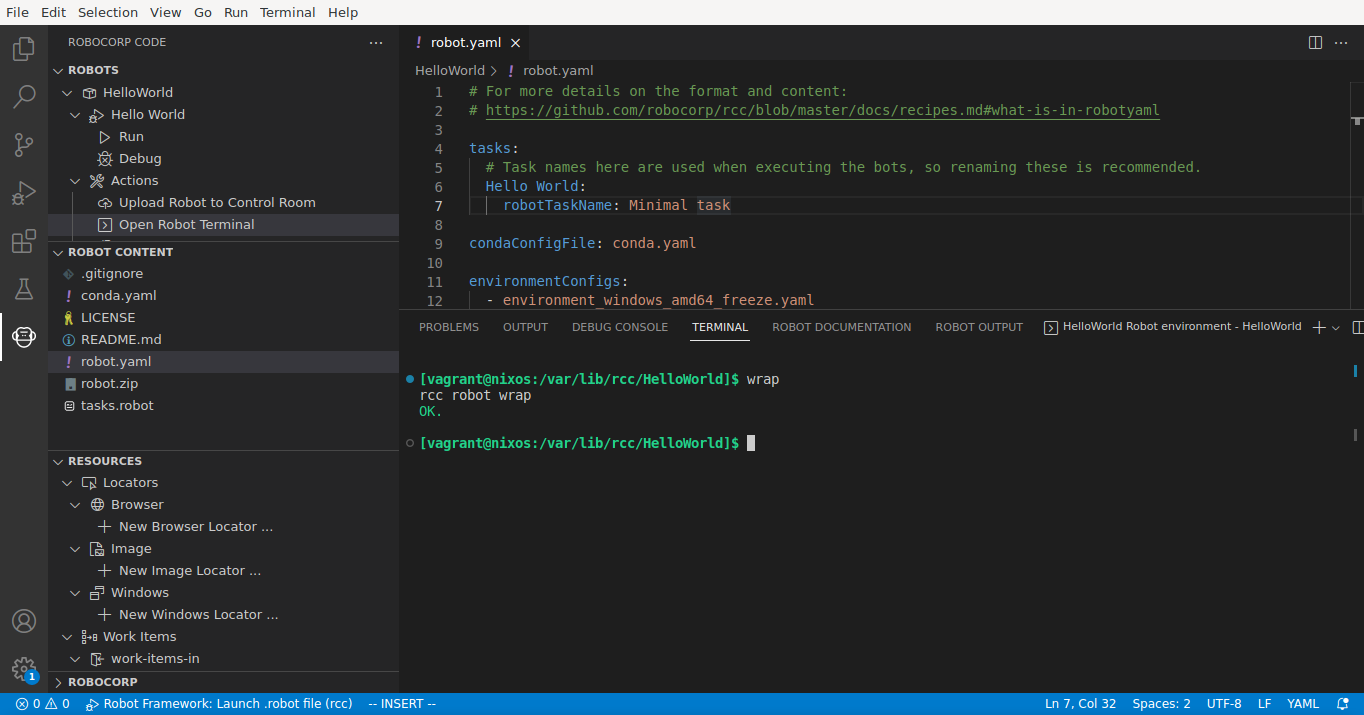
Wrap robot
With Open Robot Terminal and typing wrap, the playground alias for rcc robot wrap.
Start RCC

Watch RCC warming up
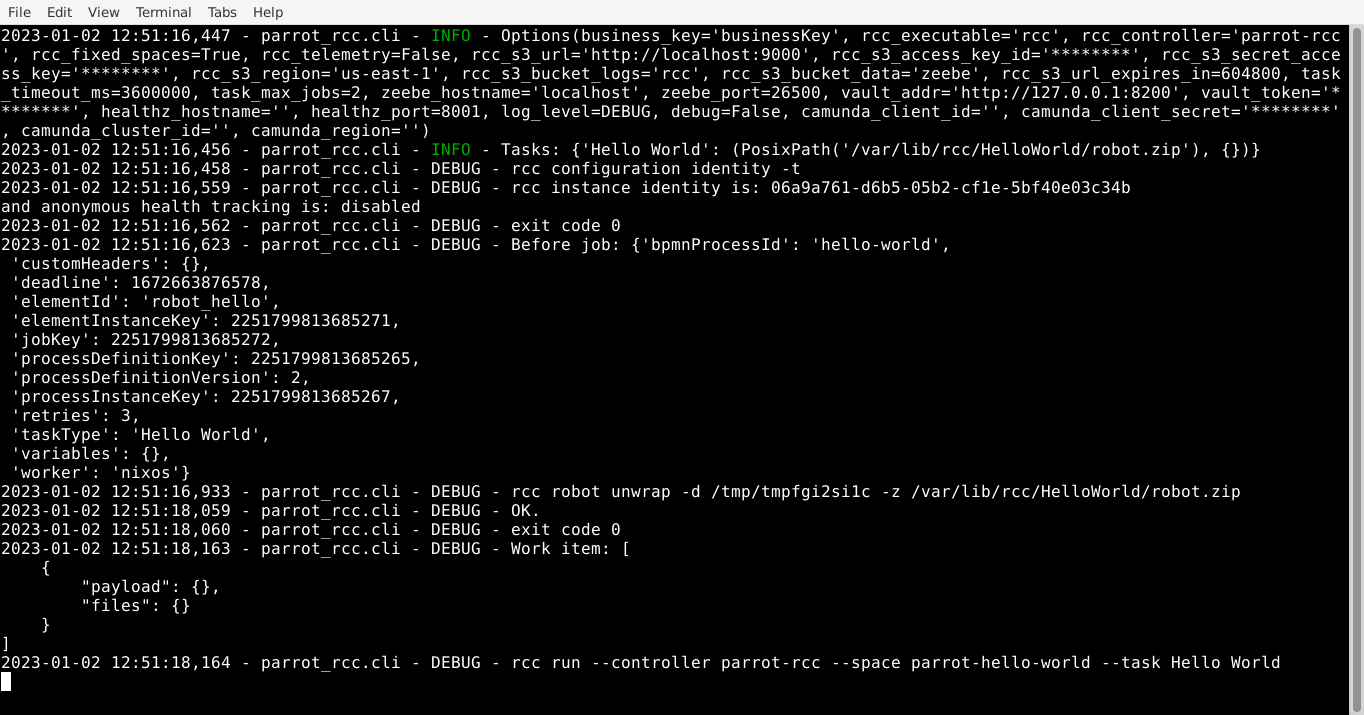
Watch RCC working
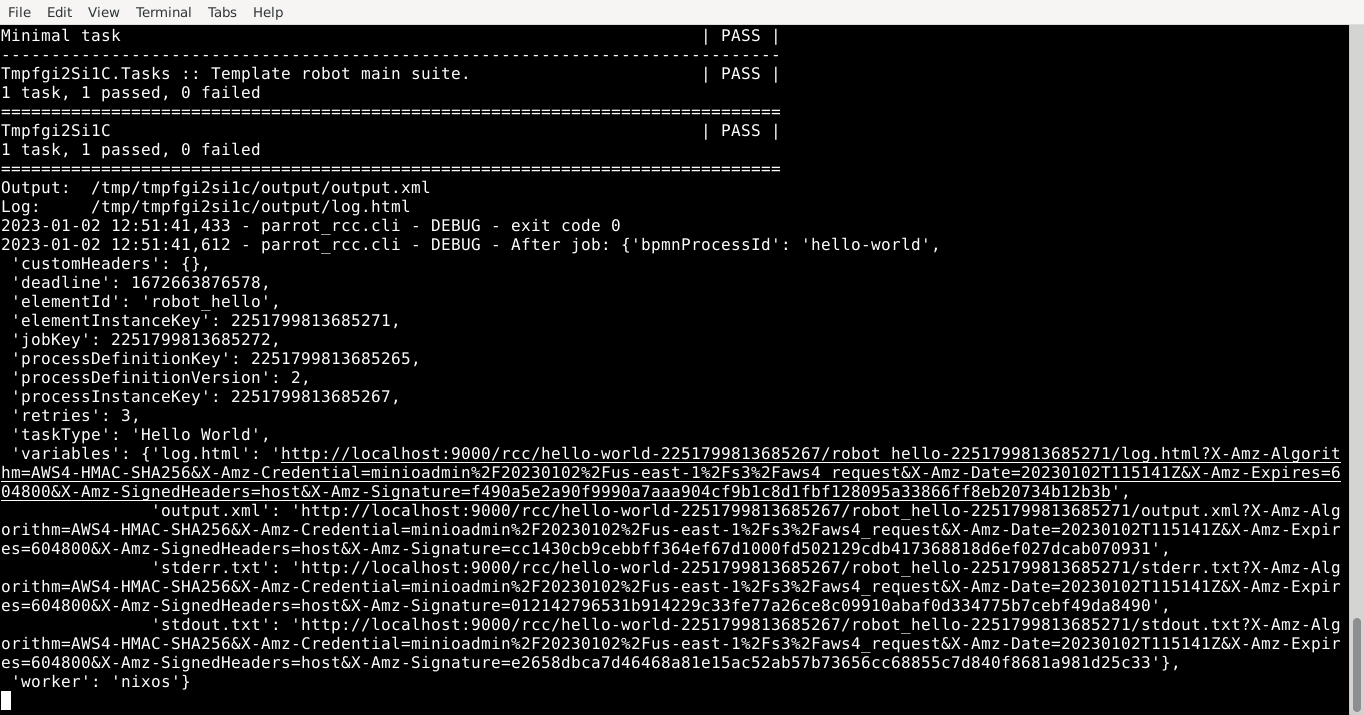
Open the log file link

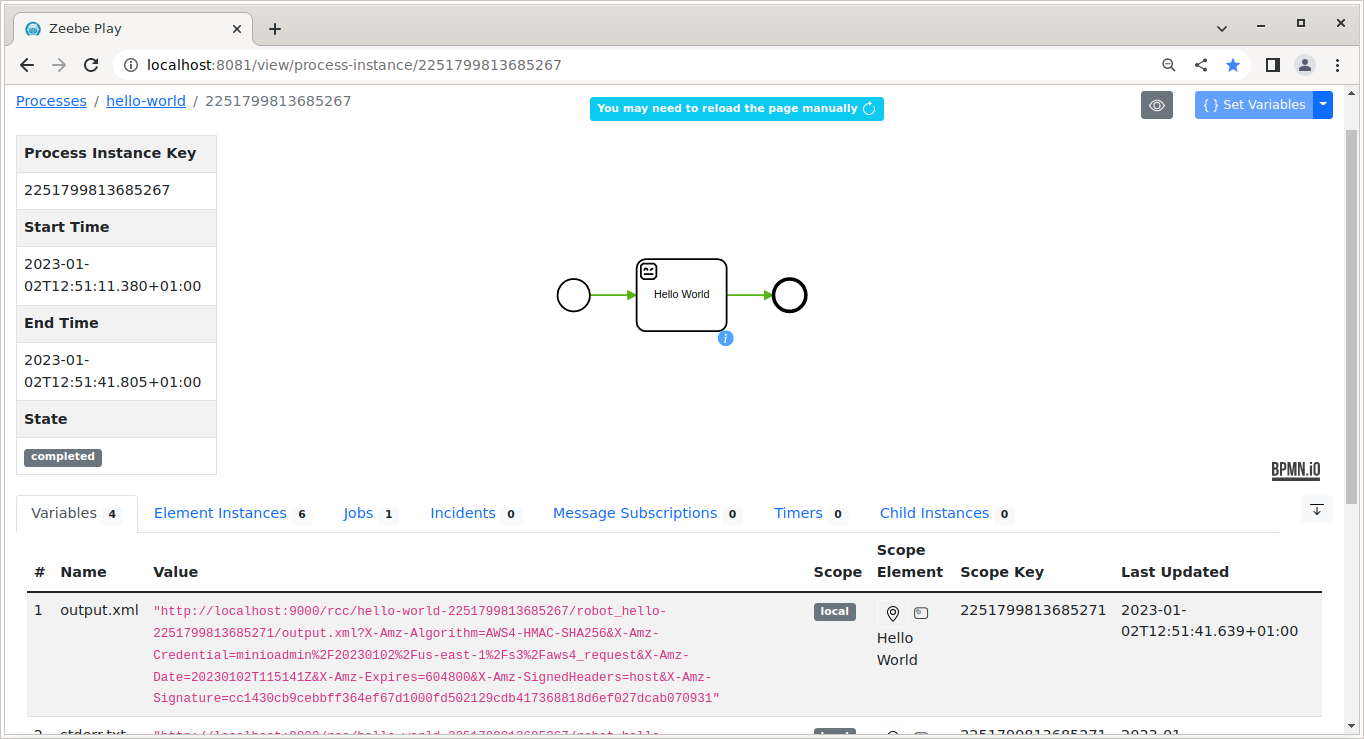
Return to Zeebe Play
That’s all! It’s time to congratulate yourself!